力矩

在一个旋转系统裏,作用力Fdisplaystyle mathbf F ,!
 、位置向量rdisplaystyle mathbf r ,!
、位置向量rdisplaystyle mathbf r ,! 、力矩τdisplaystyle boldsymbol tau ,!
、力矩τdisplaystyle boldsymbol tau ,! 、动量pdisplaystyle mathbf p ,!
、动量pdisplaystyle mathbf p ,! 、角动量Ldisplaystyle mathbf L ,!
、角动量Ldisplaystyle mathbf L ,! ,這些物理量之間的关系。
,這些物理量之間的关系。在物理学裏,作用力促使物體繞著轉動軸或支點轉動的趨向,[1]稱為力矩(torque),也就是扭转的力。转动力矩又称为转矩。力矩能够使物体改变其旋转运动。推擠或拖拉涉及到作用力
,而扭转則涉及到力矩。如图右,力矩τdisplaystyle boldsymbol tau ,!
簡略地说,力矩是一種施加於好像螺栓或飛輪一類的物體的扭轉力。例如,用扳手的開口箝緊螺栓或螺帽,然後轉動扳手,這動作會產生力矩來轉動螺栓或螺帽。
根據国际单位制,力矩的单位是牛顿⋅displaystyle cdot 

力矩與三個物理量有關:施加的作用力Fdisplaystyle mathbf F ,!
τ=r×Fdisplaystyle boldsymbol tau =mathbf r times mathbf F ,!。
力矩的大小為
τ=rFsinθdisplaystyle tau =rFsin theta ,!。
目录
1 历史
2 定义
3 力矩與角動量之間的關係
4 单位
5 矩臂方程式
6 静力概念
7 力矩、能量和功率之間的關係
8 力矩原理
9 參閱
10 参考文献
11 外部链接
历史
力矩的概念,起源于阿基米德对杠杆的研究。
定义

用右手定則决定力矩方向
力矩等於作用於杠杆的作用力乘以支点到力的垂直距离。例如,3 牛顿的作用力,施加於离支点2 米处,所产生的力矩,等於1牛顿的作用力,施加於离支点6米处,所产生的力矩。力矩是个向量。力矩的方向与它所造成的旋转运动的旋转轴同方向。力矩的方向可以用右手定則来决定。假设作用力垂直於杠杆。将右手往杠杆的旋转方向弯捲,伸直的大拇指与支点的旋转轴同直线,则大拇指指向力矩的方向[2]。
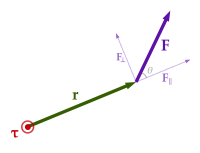
假設作用力Fdisplaystyle mathbf F ,!
施加於位置為rdisplaystyle mathbf r ,!的粒子。選擇原點(以紅點表示)為參考點,只有垂直分量F⊥displaystyle F_perp ,! 會產生力矩。這力矩τ=r×Fdisplaystyle boldsymbol tau =mathbf r times mathbf F ,!的大小為τ=|r||F⊥|=|r||F|sinθmathbf r
會產生力矩。這力矩τ=r×Fdisplaystyle boldsymbol tau =mathbf r times mathbf F ,!的大小為τ=|r||F⊥|=|r||F|sinθmathbf r  ,方向為垂直於屏幕向外。
,方向為垂直於屏幕向外。更一般地,如圖右,假設作用力Fdisplaystyle mathbf F ,!
τ =def r×Fdisplaystyle boldsymbol tau stackrel def= mathbf r times mathbf F ,!。
力矩大小為
τ=|r||F|sinθmathbf F;
其中,θdisplaystyle theta ,!
力矩大小也可以表示為
τ=rF⊥displaystyle tau =rF_perp ,!;
其中,F⊥displaystyle F_perp ,!
任何與粒子的位置向量平行的作用力不會產生力矩。
從叉積的性質,可推論,力矩垂直於位置向量rdisplaystyle mathbf r ,!
力矩與角動量之間的關係

地心引力Fgdisplaystyle mathbf F_g ,!
 的力矩造成角动量Ldisplaystyle mathbf L ,!的改变。因此,陀螺呈现进动現象。
的力矩造成角动量Ldisplaystyle mathbf L ,!的改变。因此,陀螺呈现进动現象。假設一個粒子的位置為rdisplaystyle mathbf r ,!
L=r×pdisplaystyle mathbf L =mathbf r times mathbf p ,!。
粒子的角動量對於時間的導數為
dLdt=drdt×p+r×dpdt=v×mv+r×mdvdt=r×madisplaystyle beginalignedfrac dmathbf L dt&=frac dmathbf r dttimes mathbf p +mathbf r times frac dmathbf p dt\&=mathbf v times mmathbf v +mathbf r times mfrac dmathbf v dt\&=mathbf r times mmathbf a \endaligned,!;
其中,mdisplaystyle m,!


應用牛頓第二定律,F=madisplaystyle mathbf F =mmathbf a ,!
dLdt=r×Fdisplaystyle frac dmathbf L dt=mathbf r times mathbf F ,!。
按照力矩的定義,τ =def r×Fdisplaystyle boldsymbol tau stackrel def= mathbf r times mathbf F ,!
τ=dLdtdisplaystyle boldsymbol tau =frac mathrm d mathbf L mathrm d t,!。
作用於一物體的力矩,決定了此物體的角動量Ldisplaystyle mathbf L ,!
假設幾個力矩共同作用於物體,則這幾個力矩的合力矩τnetdisplaystyle boldsymbol tau _mathrm net ,!
τ1+⋯+τn=τnet=dLdtdisplaystyle boldsymbol tau _1+cdots +boldsymbol tau _n=boldsymbol tau _mathrm net =frac mathrm d mathbf L mathrm d t,!。
關於物體的繞著固定軸的旋轉運動,
L=Iωdisplaystyle mathbf L =Iboldsymbol omega ,!;
其中,Idisplaystyle I,!

所以,取上述方程式對時間的導數:
τnet=dLdt=d(Iω)dt=Idωdt=Iαdisplaystyle boldsymbol tau _mathrm net =frac mathrm d mathbf L mathrm d t=frac mathrm d (Iboldsymbol omega )mathrm d t=Ifrac mathrm d boldsymbol omega mathrm d t=Iboldsymbol alpha ,!;
其中,αdisplaystyle boldsymbol alpha ,!
单位
力矩的定义是距离乘以作用力。根據国际单位制,力矩的单位是牛顿⋅displaystyle cdot
根據国际单位制,能量与功量的单位是焦耳,定义为1牛顿⋅displaystyle cdot 
E=τθdisplaystyle E=tau theta ,!。
其中,Edisplaystyle E,!
根據英制,力矩的单位是英尺⋅displaystyle cdot
矩臂方程式

矩臂图
在物理学外,其他的学术界裡,力矩时常会如以下定义:
τ=(moment arm)⋅forcedisplaystyle boldsymbol tau =(textmoment arm)cdot textrm force,!。
右图显示出矩臂(moment arm)、前面所提及的相对位置rdisplaystyle mathbf r ,!
静力概念
当一个物体在静态平衡时,合力是零,对任何一点的合力矩也是零。二维空间的平衡要求是
∑Fx=0displaystyle sum F_x=0,!,
∑Fy=0displaystyle sum F_y=0,!,
∑τ=0displaystyle sum tau =0,!。
这里,Fx, Fydisplaystyle F_x, F_y,!
力矩、能量和功率之間的關係
假設施加作用力於一物體,使得此物體移動一段距離,則作用力對於此物體做了機械功。類似地,假設施加力矩於一物體,使得此物體旋轉一段角位移,則力矩對於此物體做了機械功。對於穿過質心的固定軸的旋轉運動,以數學方程式表達,
W=∫θ1θ2τ dθdisplaystyle W=int _theta _1^theta _2tau mathrm d theta ,!;
其中,Wdisplaystyle W,!



根據功能定理,Wdisplaystyle W,!
Krot=12Iω2displaystyle K_mathrm rot =tfrac 12Iomega ^2,!。
功率是單位時間內所做的機械功。對於旋轉運動,功率Pdisplaystyle P,!
P=τ⋅ωdisplaystyle P=boldsymbol tau cdot boldsymbol omega ,!。
請注意,力矩注入的功率只跟瞬時角速度有關,而角速度是否在增加中,或在減小中,或保持不變,功率都與這些狀況無關。
實際上,在與大型輸電網路相連接的發電廠裏,可以觀察到這關係。發電廠的發電機的角速度是由輸電網路的頻率設定,而發電廠的功率輸出是由作用於發電機轉動軸的力矩所決定。
在計算功率時,必須使用一致的單位。採用國際單位制,功率的單位是瓦特,力矩的單位是牛頓-米,角速度的單位是每秒弧度(不是每分鐘轉速rpm,也不是每秒鐘轉速)。
力矩原理
力矩原理闡明,幾個作用力施加於某位置所產生的力矩的總和,等於這些作用力的合力所產生的力矩。力矩原理又名伐里農定理(Varignon's theorem)[5](以法国科学家兼神父皮埃爾·伐里農命名),以方程式表達,
(r×F1)+(r×F2)+⋯=r×(F1+F2+⋯)displaystyle (mathbf r times mathbf F _1)+(mathbf r times mathbf F _2)+cdots =mathbf r times (mathbf F _1+mathbf F _2+cdots ),!。
參閱
- 馬力
- 扭力轉換器
- 刚体动力学
機械平衡(mechanical equilibrium)
扭矩扳手(torque wrench)
参考文献
^ Serway, R. A. and Jewett, Jr. J. W. (2003). Physics for Scientists and Engineers. 6th Ed. Brooks Cole. ISBN 978-0-534-40842-8.
^ *喬治亞州州立大學(Georgia State University)線上物理網頁:力矩的右手定則, [2007-09-08]
^ SI brochure Ed. 8, Section 5.1, Bureau International des Poids et Mesures, 2006 [2007-04-01], (原始内容存档于2007-05-19)
^ SI brochure Ed. 8, Section 2.2.2, Bureau International des Poids et Mesures, 2006 [2007-04-01], (原始内容存档于2005-03-16)
^ Engineering Mechanics: Equilibrium, by C. Hartsuijker, J. W. Welleman, page 64
Tipler, Paul. Physics for Scientists and Engineers: Mechanics, Oscillations and Waves, Thermodynamics (5th ed.). W. H. Freeman. 2004. ISBN 978-0-7167-0809-4.
外部链接
- 模擬力矩平衡的Java小程式
Torque and Angular Momentum in Circular Motion on Project PHYSNET.- Torque Unit Converter
| ||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


